伺服驱动器08故障处理?
一、伺服驱动器08故障处理?
答:伺服驱动器上电第一位显示8是吧,后面没有显示,而且8很亮,控制主板坏了,CPU周边电路断路,有的是PCB板内部夹层不良,我这里已经出现两三台了,有时用手按压控制主板的某个部位就正常了,松手就不行了。
需要找到断线所在的位置,然后看是需要要跳线解决还是PCB板打孔解决,反正查找是挺费时的一件事。
二、伺服驱动器原理图
伺服驱动器原理图详解
伺服驱动器是现代工业控制系统中广泛使用的一种关键设备。它通过接收控制信号,控制伺服电机的运动,从而实现高精度的位置、速度和力控制。在本文中,我们将详细介绍伺服驱动器的原理图和工作原理。
伺服驱动器的组成
伺服驱动器主要由三个部分组成:功率部分、信号处理部分和保护部分。功率部分负责将电源电压转换为适当的电流和电压,驱动伺服电机实现运动。信号处理部分负责解析控制信号,将命令信号转换为伺服电机能够理解的信号。保护部分提供多种保护功能,如过压保护、过流保护和过热保护等。
伺服驱动器的工作原理
伺服驱动器的工作原理可以简单描述为以下几个步骤:
- 接收控制信号
- 信号处理
- 功率转换
- 驱动伺服电机
- 保护功能
伺服驱动器从控制系统接收控制信号,通常是模拟信号或数字信号。
伺服驱动器对接收到的控制信号进行解析和处理,将其转换为适用于伺服电机的控制信号。
处理后的控制信号经过功率部分的转换,将电源电压转换为适合伺服电机的电流和电压。
转换后的电流和电压被发送到伺服电机,驱动伺服电机实现精确定位、速度控制或力控制。
伺服驱动器在工作过程中提供多种保护功能,例如过流保护、过热保护和缺相保护等。这些保护功能可以保证伺服驱动器和伺服电机的安全运行。
伺服驱动器原理图
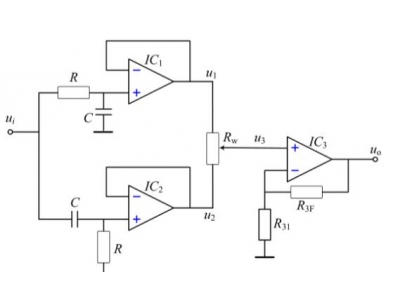
伺服驱动器原理图是对伺服驱动器内部电路的图示,显示了伺服驱动器各部分之间的连接和信号流动。下面是一个常见的伺服驱动器原理图:
从上图可以看出,伺服驱动器原理图包括输入接口、信号处理芯片、功率电路和输出接口等部分。
输入接口负责接收控制信号,常见的输入信号包括位置指令、速度指令和力指令等。
信号处理芯片是伺服驱动器的关键部分,它负责将接收到的控制信号解析并转换为驱动电机所需的信号。
功率电路是将输入信号转换为适合伺服电机工作的电流和电压的部分。
输出接口将转换后的信号发送到伺服电机,带动伺服电机完成运动控制。
伺服驱动器的应用
伺服驱动器广泛应用于机器人技术、自动化设备、数控机床、印刷机械等领域。它们在提高生产效率、提升产品质量和实现精密控制方面发挥着重要的作用。
在机器人技术领域,伺服驱动器可以实时控制机器人的运动轨迹和姿态,使机器人具备高精度、高速度的运动能力。
在自动化设备中,伺服驱动器可以精确控制设备的位置和速度,提高生产效率和产品质量。
在数控机床领域,伺服驱动器能够实现复杂的刀具路径控制和高速切削,使机床具备高精度的加工能力。
总之,伺服驱动器在现代工业控制系统中的应用越来越广泛,为工业自动化和智能制造提供了可靠的动力和控制手段。
结论
通过对伺服驱动器原理图和工作原理的详细解释,我们更加深入地了解了伺服驱动器的基本原理和工作过程。伺服驱动器在工业领域发挥着重要作用,可以实现高精度的位置、速度和力控制,提高生产效率和产品质量。随着科技的不断发展,伺服驱动器的应用前景将更加广阔。
三、如何进行伺服驱动器维修及常见故障处理
引言
伺服驱动器作为现代工业中不可或缺的设备之一,其稳定运行对于生产效率至关重要。然而,伺服驱动器在长时间运行中也会出现各种故障,了解如何进行维修及常见故障处理对于保障生产至关重要。
伺服驱动器常见故障
在进行维修之前,首先需要了解伺服驱动器可能出现的常见故障。常见的故障包括但不限于:电路板故障、电源故障、控制器故障、编码器故障、连接器故障等。这些故障可能会导致伺服驱动器无法正常工作,对于生产线造成严重影响。
如何进行伺服驱动器维修
一旦发现伺服驱动器出现故障,及时的维修将有助于尽快恢复生产。以下是进行伺服驱动器维修的基本步骤:
- 故障判断:通过故障代码、指示灯等判断问题所在。
- 电路检测:使用万用表等工具进行电路检测,找出可能损坏的元件。
- 零部件更换:将损坏的元件进行更换。
- 功能测试:更换元件后进行功能测试,确保伺服驱动器正常工作。
常见故障处理
针对伺服驱动器常见故障,下面给出一些常见的处理方法:
- 电路板故障:可以尝试焊接、更换元件等方法进行修复。
- 电源故障:检查电源输入,确保电压稳定。
- 控制器故障:重新设定控制器参数,检查控制器的连接。
- 编码器故障:检查编码器连接,确认不良连接并更换。
- 连接器故障:重新连接或更换损坏的连接器。
结语
伺服驱动器的维修需要技术人员具备扎实的电路知识和维修经验。通过正确的维修方法及常见故障处理,能够最大程度地保障生产线的稳定运行。
感谢您阅读本文,希望能为您在伺服驱动器维修方面提供一些帮助。
四、yaskawa伺服驱动器041报警处理?
安川伺服驱动器报041故障代码表示为负载连续过载,一般处置方式如下,供参考:
1、检查伺服驱动器电源电压是否在正常范围之内
2、检查电动机及其机械负载是否灵活、卡滞、堵转现象或在运行过程中突然加载情况
3、检查伺服器电源电路与输出电路是否正常
五、伺服驱动器201报错怎么处理?
显示201故障是过电流
原因及解决措施:
1、 先确认电机动力线相序是否接对,然后在驱动器测断开电机动力线,再使能(设成零速)看 看是否还报,以判断是驱动器内部问题,还是电机或线缆存在问题。
2、 查看故障时(H0B-33\34\38\39)的电流多大,若电流不大,则很有可能是误报,硬件被干扰误动作了,检测接线,确保系统的PE接线良好。
3、如果电流大,根据ER740的排查方法确认编码器是否异常。
4、如果电流大且编码器无异常,使用伺服后台软件查看机械上是否会有负载突变。
六、伺服驱动器电池报警怎么处理?
是电池电量快耗尽,应即时充电
七、伺服驱动器接线原理图
伺服驱动器接线原理图是许多机械设备中必不可少的一部分。它是将控制信号转换为电力信号的关键元件,用于控制伺服电机的运动。这篇博客将介绍伺服驱动器接线原理图的基本知识和工作原理。
伺服驱动器接线原理图的组成
伺服驱动器接线原理图通常由以下几个主要组成部分组成:
- 电源 - 用于提供电力给伺服驱动器。
- 输入端口 - 用于接收控制信号。
- 输出端口 - 用于输出电力信号给伺服电机。
- 信号调节器 - 用于调节控制信号。
- 电流检测装置 - 用于监测输出电流。
伺服驱动器接线原理图的工作原理
伺服驱动器接线原理图的工作原理如下:
- 电源供电 - 伺服驱动器通过连接到电源获得所需的电力。
- 控制信号输入 - 控制信号通过输入端口输入到伺服驱动器中。
- 信号调节 - 信号调节器对输入的控制信号进行处理和调节,以满足对伺服电机运动的要求。
- 电力输出 - 经过信号调节后的电力信号从输出端口输出,并提供给伺服电机。
- 电流监测 - 电流检测装置用于监测输出电流的大小和稳定性,以确保伺服电机的正常运行。
通过上述工作原理,伺服驱动器实现了对伺服电机的精确控制和运动。
伺服驱动器接线原理图的应用
伺服驱动器接线原理图在许多领域和行业都有广泛的应用。以下是一些常见的应用领域:
- 机械制造业 - 伺服驱动器广泛应用于机械制造行业,例如数控机床、包装机械、印刷机械等。
- 自动化系统 - 在自动化系统中,伺服驱动器用于控制各种运动设备和机械手臂。
- 机器人技术 - 在机器人技术中,伺服驱动器用于控制机器人的各项动作,实现精确而灵活的运动。
- 航空航天领域 - 伺服驱动器在航空航天领域中扮演着重要角色,用于控制飞行器的稳定和导航。
伺服驱动器接线原理图的优势
伺服驱动器接线原理图具有许多优势,使其成为许多行业和设备的首选:
- 精确控制 - 伺服驱动器能够实现对伺服电机的精确控制,使设备运动更加准确和稳定。
- 快速响应 - 伺服驱动器能够快速响应输入的控制信号,实现实时的运动控制。
- 高效能 - 伺服驱动器具有高效能的特点,能够将电力转化为机械运动效率高。
- 多功能性 - 伺服驱动器可适应多种运动要求,并具备灵活的调节和配置功能。
- 可靠性 - 伺服驱动器设计经过严格测试和验证,具备高可靠性和稳定性。
以上优势使得伺服驱动器接线原理图在现代工业和科技领域中得到了广泛应用。
结论
伺服驱动器接线原理图是现代机械设备中不可或缺的一部分。掌握伺服驱动器接线原理图的基本知识和工作原理,对于理解伺服驱动器的工作原理以及正确安装和使用伺服驱动器具有重要意义。
通过合理选择和配置伺服驱动器接线原理图,可以提高机械设备的性能和可靠性,满足不同行业和领域对于运动控制的需求。
希望本篇博客对您理解伺服驱动器接线原理图有所帮助,谢谢阅读!
八、松下伺服驱动器报警55.0怎么处理?
1. 报警55.0是表示伺服驱动器的过流保护功能被触发,需要进行处理。2. 过流保护功能被触发的原因可能是伺服驱动器内部出现故障,或者外部负载过大等原因。需要检查伺服驱动器内部的电路和连接线路是否正常,同时检查外部负载是否符合伺服驱动器的额定负载。3. 如果检查后发现故障无法解决,建议联系松下售后服务中心进行维修或更换。同时,平时使用时应注意避免过载和过压等情况的发生,以保证伺服驱动器的正常运行。
九、伺服驱动器报警a14怎么处理?
主要检查输入电源是不是正常的。如果电压正常在220左右,那就是驱动器内部坏了,要送修。
安川伺服电机,又称YASKAWA安川伺服马达,原产地日本,在中国沈阳、上海嘉定也设有工厂。
十、刀塔伺服驱动器报警怎么处理?
1、检查+INHIBIT 和 –INHIBIT 端口,将命令信号地和驱动器信号地相连。
2、检查并提高供电电压。
3、检查电机相位设定开关是否正确,电机转动时检测Hall A, Hall B, Hall C的电压。电压值应该在5VDC和0之间。
4、将驱动器上的TACH+和TACH-对调接入,将驱动器上的ENC A和ENC B对调接入,在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
推荐阅读